|
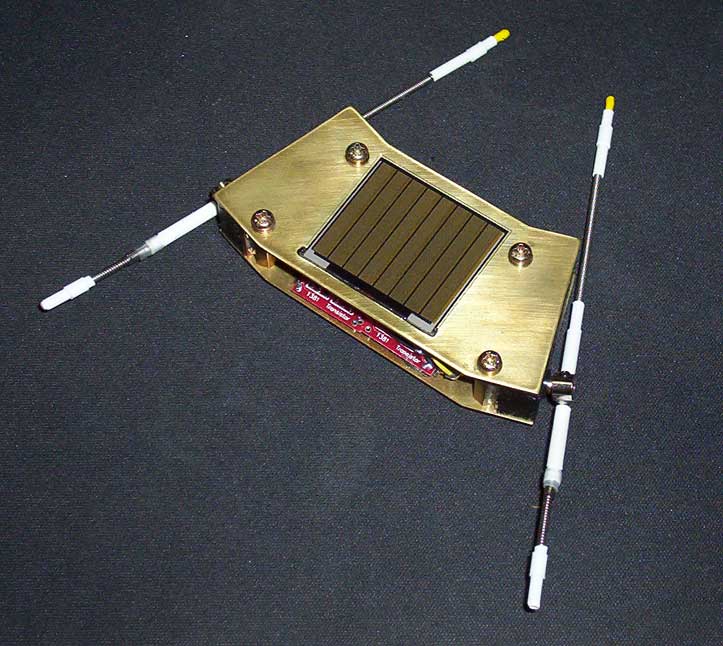
T-o2 was an attempt at a modular turbot
design. I decided to take this design approach after stripping a
gear-motor in my first turbot, Turbot_01. With no way to change the
gear-motor, I was forced to retire my favorite robot. The design of T-o2
came out very well and exceeded all of my expectations.
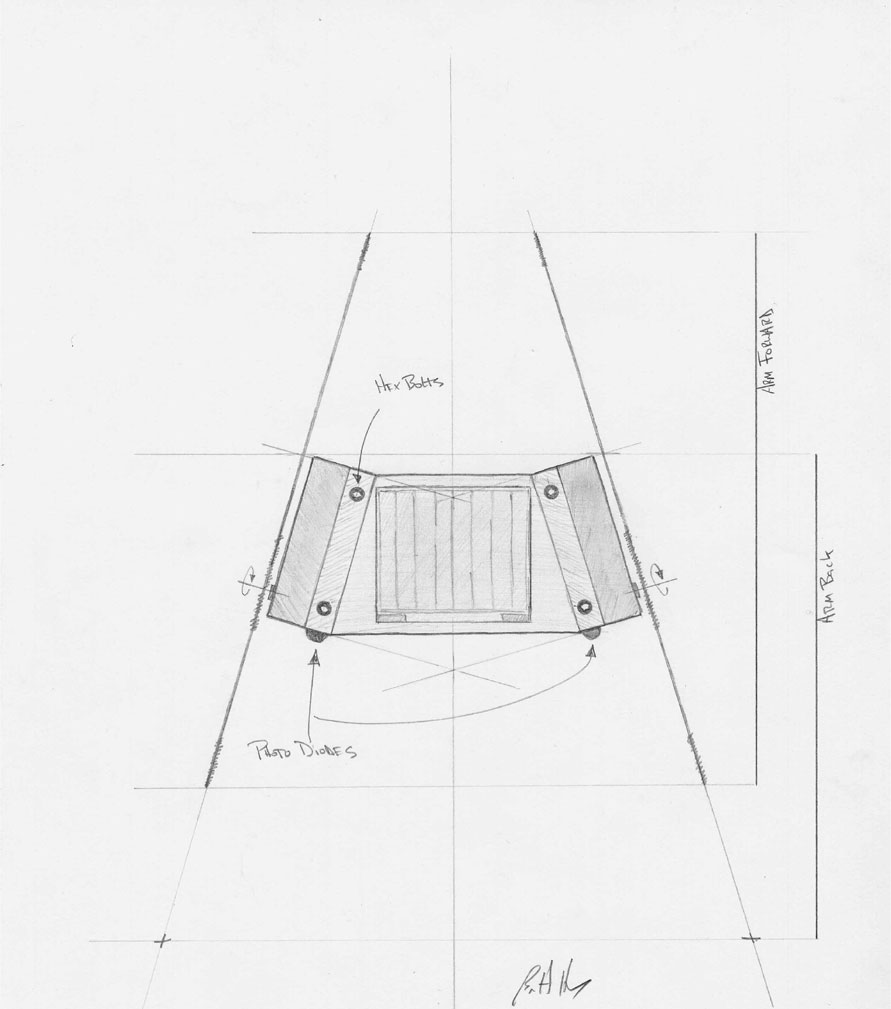
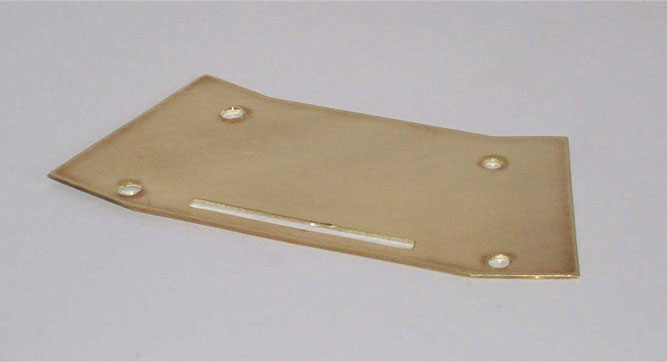
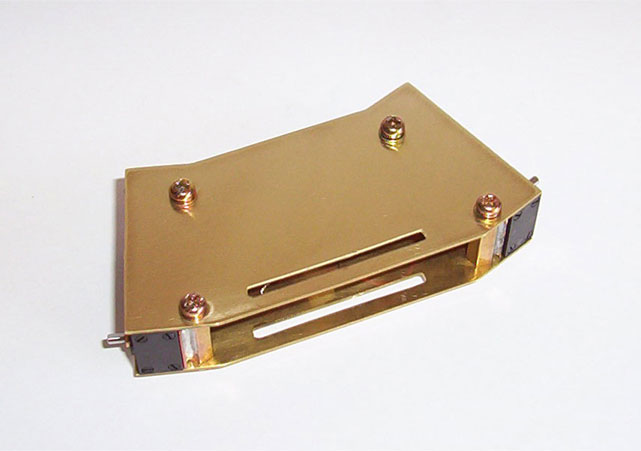
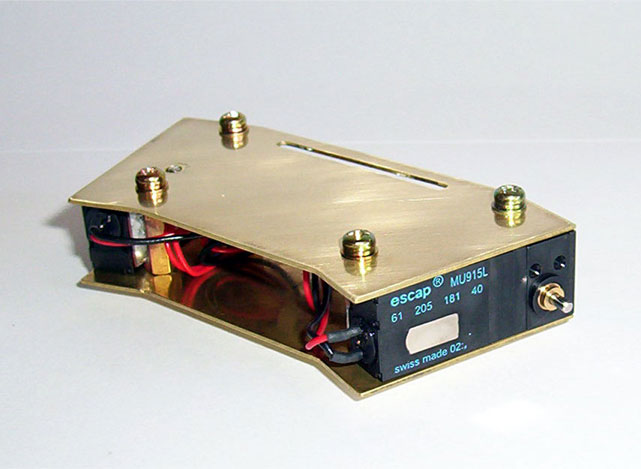
The motors are each fixed to a mounting plate which also serve as
standoffs for the two brass chassis plates. I used a Dremel tool to
custom machine the chassis plates. With the new design, it is possible to
easily access the internal circuitry by removing only four screws. The
whole robot can be disassembled and reassembled with little fuss.
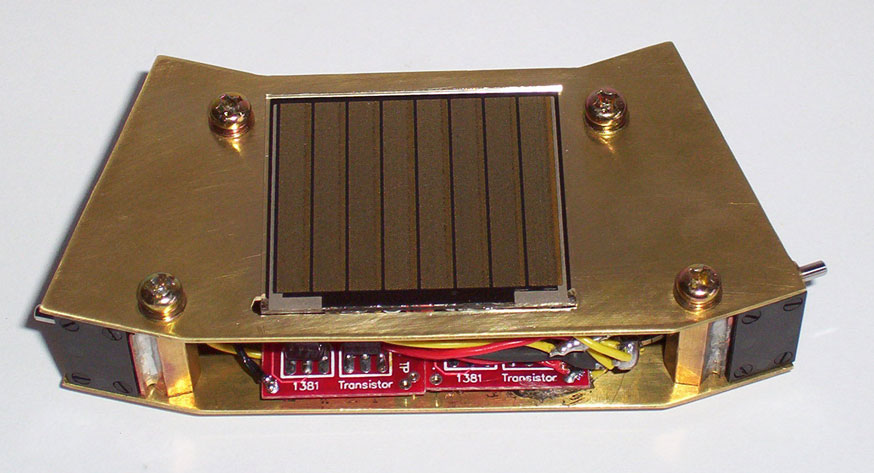
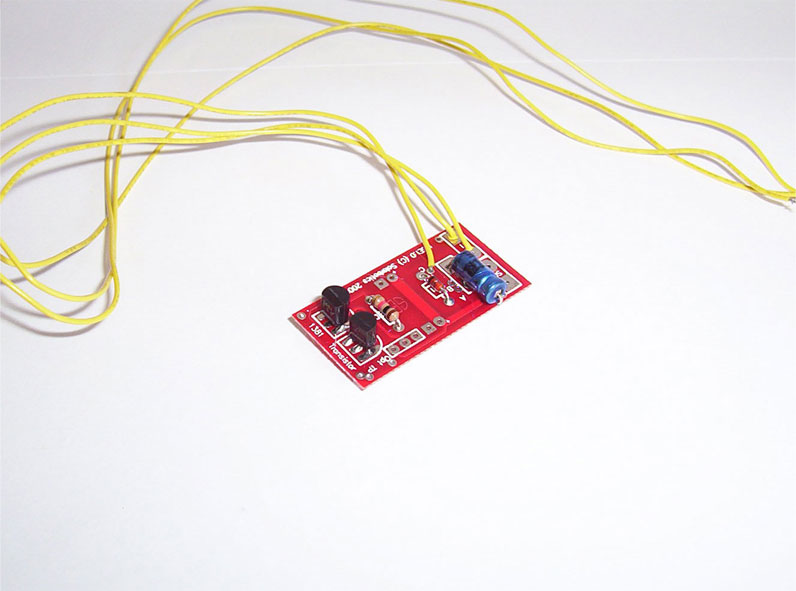
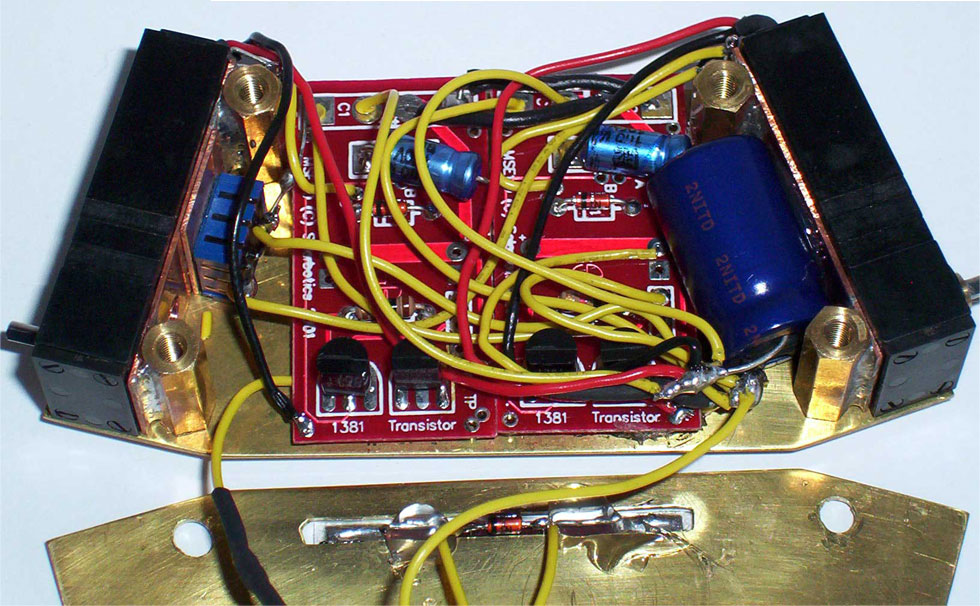
For the circuitry, I used two Miller Solar Engine PCBs from
Solarbotics
and wired them together to form a Miller Popper configuration (the same
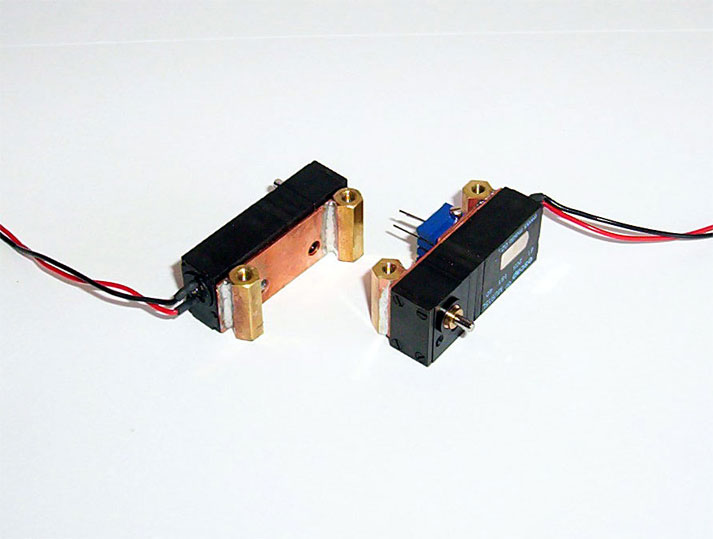
circuit I used in Turbot_01). I chose some very nice Escap gear-motors
for their efficiency and small footprint (more on this later). By using
the
Solarbotics PCBs and the compact
gearmotors, I was able to fit everything in a nice small package while, at
the same time, conserving the ability to repair any future malfunctions
(the downfall of Turbot_01).
As for the performance, I have to say I am very disappointed. I
unknowingly used gearmotors with the wrong gear reduction, which provided
the robot with too little torque to flip itself. I need to find some
Escap gearmotors with the same gear ratio as I used on Turbot_01 and
replace these to get the robot working.
In all I am very happy with the design of the robot but, sadly, it
was doomed from the start due to the insufficient gear ratio. Hopefully I
can find some appropriately sized motors to replace these to get the robot
working. Oh well.... it was a wonderful learning experience and its
pretty (one kick-ass paper weight). |