|
Walker 01 |
|
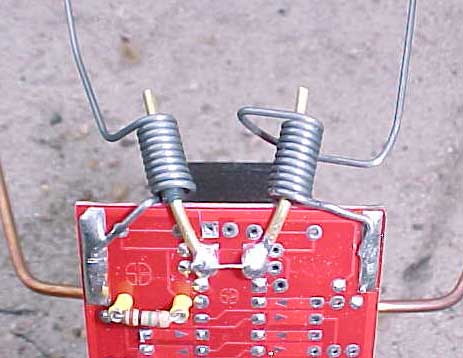
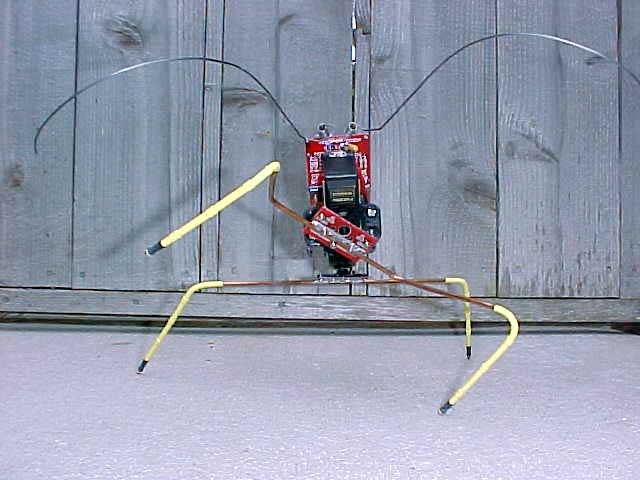
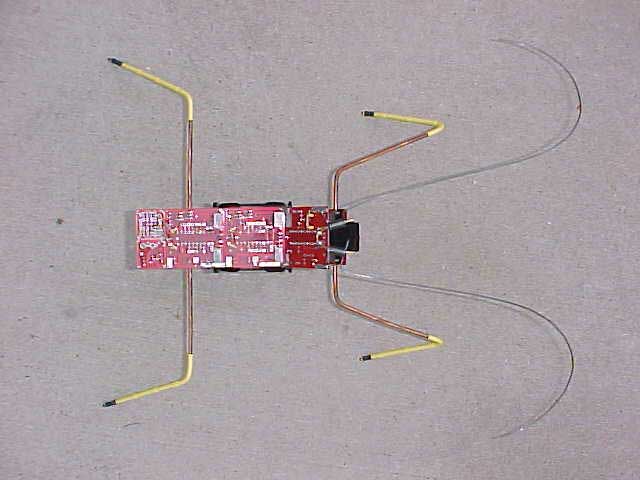
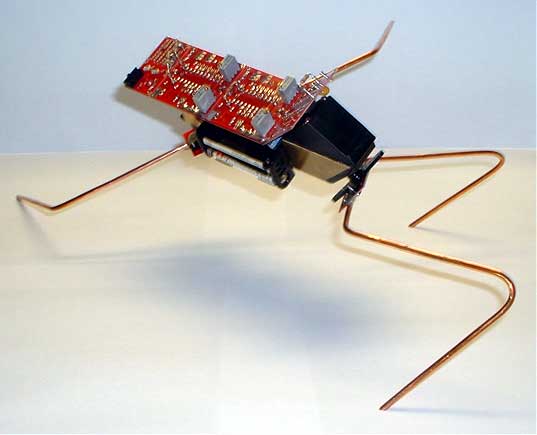
My first attempt at a walking robot. I used Solarbotics Sc1 and IMx 1.0 PCBs to make the job easier. The frame is made out of brass sheets that I found at my local hobby store. The legs are 8 gauge copper wire and are attached to the servos using Solarbotics LMP1 PCBs. For power, it uses four AAA Ni-Cds. The leg design is pretty standard (I wanted to make a walker that worked before trying to get creative) and can be found at www.solarbotics.com. It took awhile to figure out the adjustments for the Sc1 trimpots, but I eventually got it walking. All said and done I am really happy with how it came out. It has a nice combination of speed and climbing ability. |
|
|
![]()