|
PLANS / DRAWINGS |
|
|
This page contains samples of plans, drawings, or notes about robots that were fortunate enough to make it onto paper. I have posted these here for your viewing pleasure and to help spark ideas. Please use what you need but I ask that you respect my work and give credit where due. Thanks, and get building. |
|
|
|
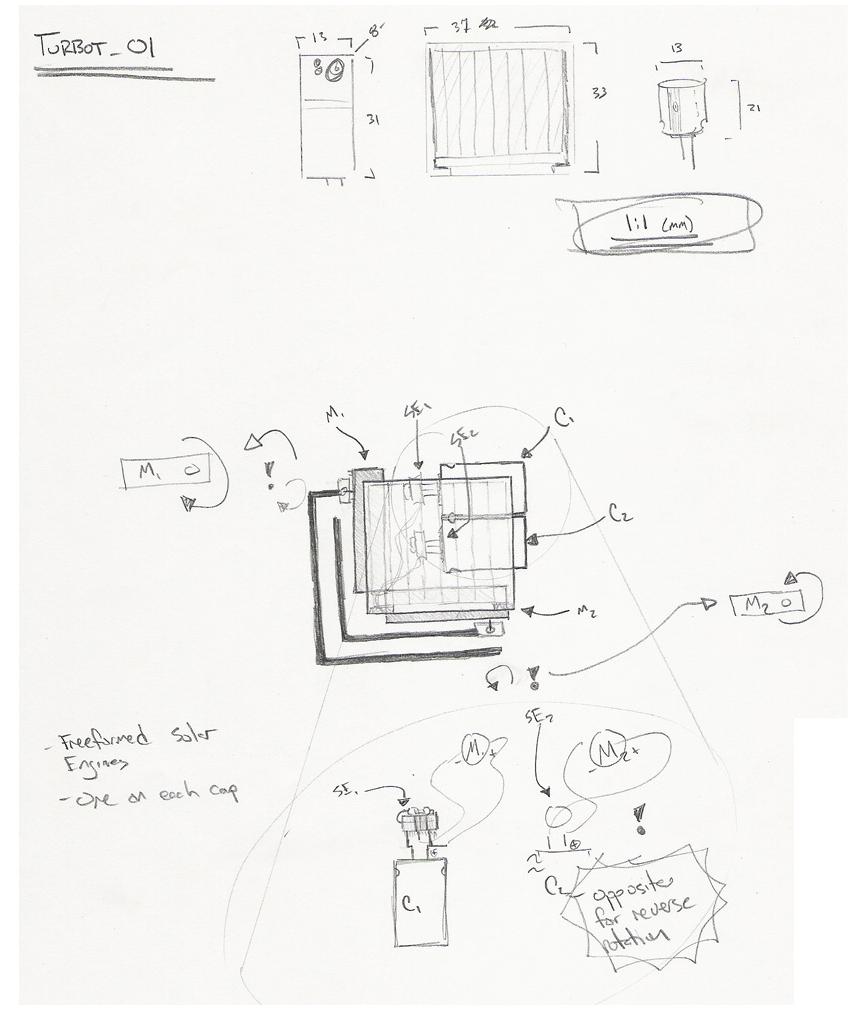
Turbot 01 Initial Plans:
[Abandoned for redesign] |
|
|
Turbot 01 Final Plans:
[Project completed] This is the final version of Turbot 01's design. This design is built around spring-steel arms to prevent stripping the gearmotors. The motor positioning changed due to the longer, flexible arms. The general shape is based off of Mark Tildens Liam and Sith turbots. |
|
|
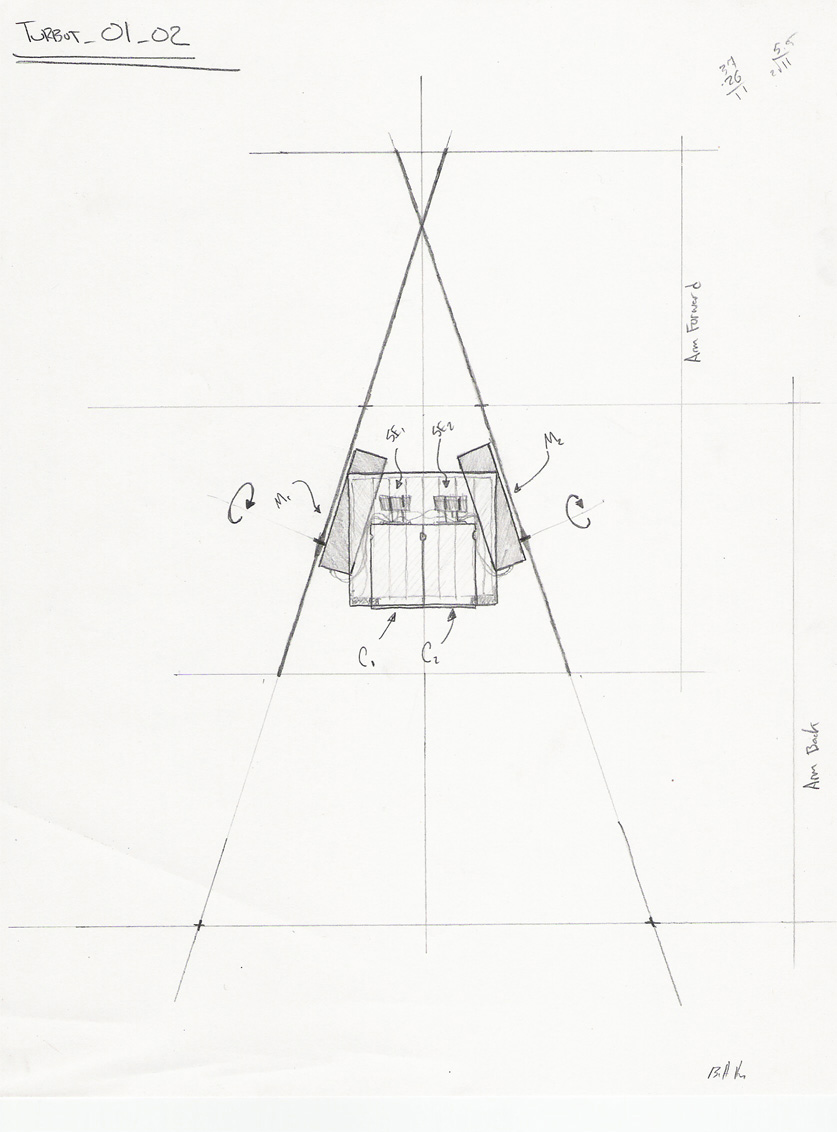
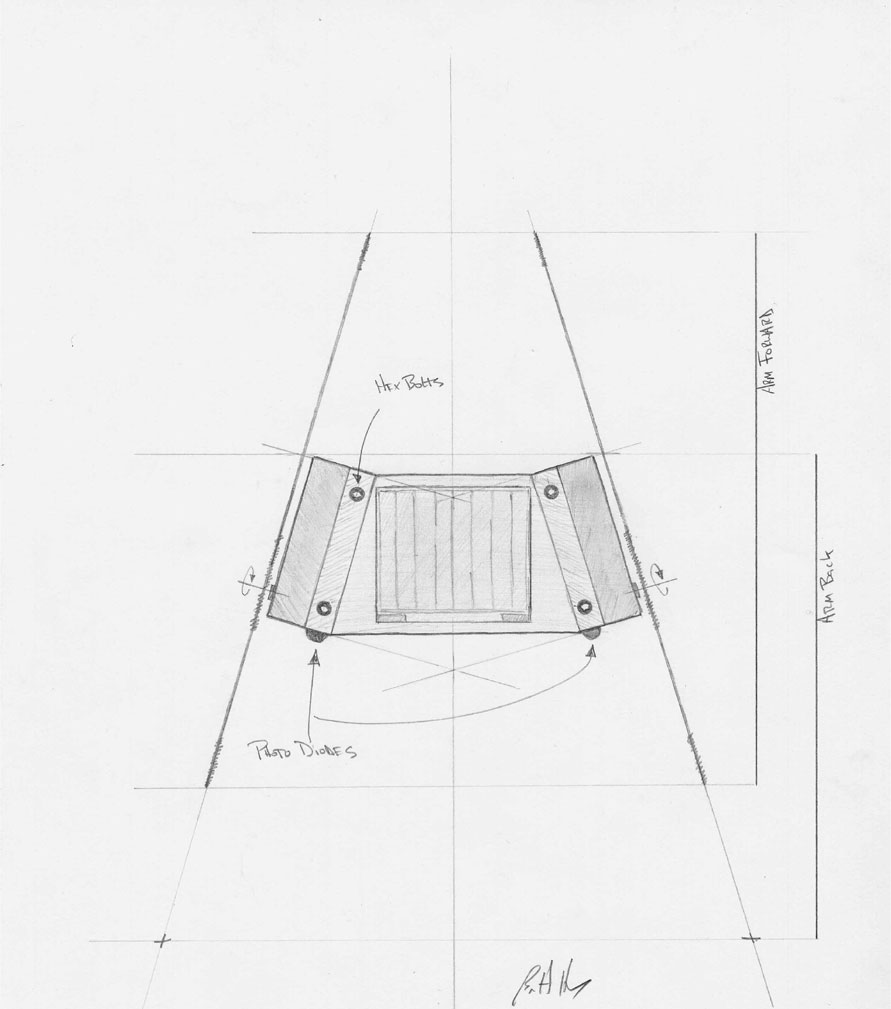
T-o2 Scale Drawing:
[Project Completed] T-o2 is designed to be a modular turbot platform. The idea is to be able to disassemble and repair/replace and part that went bad. The chassis is composed of four pieces, two outer plates and a set of standoffs that double as motor mounts. |
|
|
T-o3 Plans:
[Project Pending] This design calls for some pager gearmotors from Solarbotics. It is designed to be light, small, and robust. I have incorporated everything learned from previous designs into this one, making it (hopefully) the best design yet. I want to keep a small footprint but might try a more complex circuit than what I have used in the past if it will fit. Am definitely looking forward to building this one... |
|
|
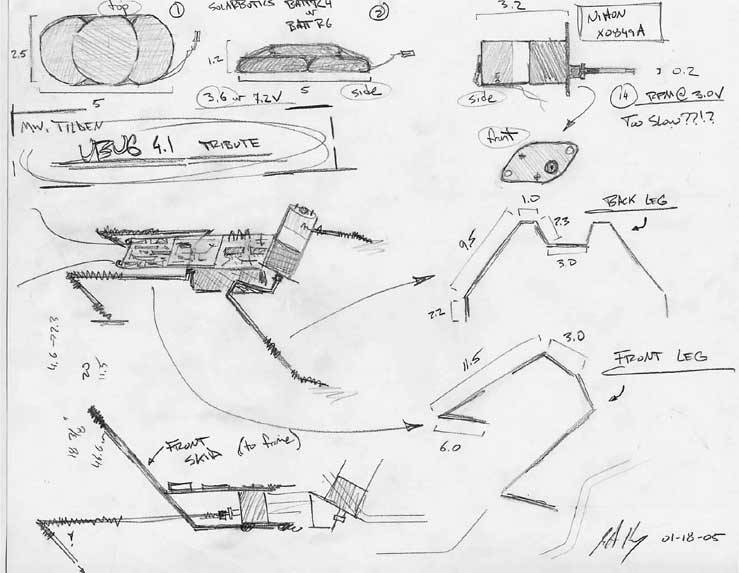
mwt UBUG 4.1 tribute Plans:
[Project Underway] This design is entirely based off of Mark Tilden's UBUG 4.1, an aesthetic inspiration to me. I tried to keep everything as similar as possible but all I had to go by is a couple pictures. Everything was calculated with a printout, ruler, and logical deduction so I am not quite positive it will walk. Check out the PCB section for my custom PCB walker layout made especially for this robot. |
![]()