|
T-o3 [now uTB] |
|
This will be my third
turbot and I plan on having this one as structurally sound as possible.
I have based the shape off of a pair of turbots by Mark Tilden known as
Liam and Sith. They are incredibly small and appear to be very
sturdy. For the circuitry, I will be using the BiDirTurbot2-5
circuit by Wilf Righter. It is a photophillic turbot controller with
bidirectional capabilities along with a motor overload sensor. |
|
Project Updates |
|
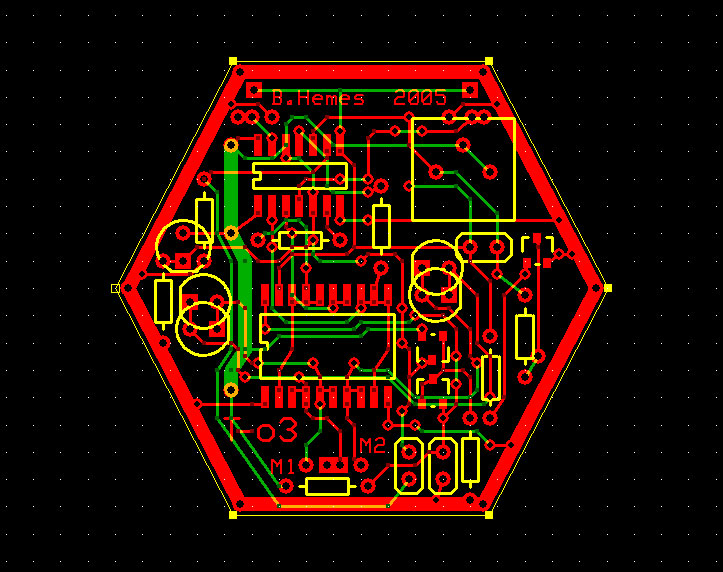
July 21, 2005 |
July 19, 2005 I
started to layout the main PCB today and, after some decent progress,
decided to scrap it and start over. This particular configuration
did not lend itself well to the hexagonal shape and required many long
traces across almost the whole board. I will, however keep the same
size and shape of the board for the next version. I
started to layout the main PCB today and, after some decent progress,
decided to scrap it and start over. This particular configuration
did not lend itself well to the hexagonal shape and required many long
traces across almost the whole board. I will, however keep the same
size and shape of the board for the next version. |
![]()