|
uTB Series (Micro Turbot Series) |
||
| The uTB (Micro Turbot) Series is a series of six turbots designed mainly around size and robustness. These are some of the smallest turbots that exist to date (Liam and Sith by Mark W. Tilden are a little smaller). The uTBs' small size, light weight, and sturdy chassis allow them to take significant amounts of abuse and still remain functional. They can easily tumble down stairs and survive. | ||
|
|
||
|
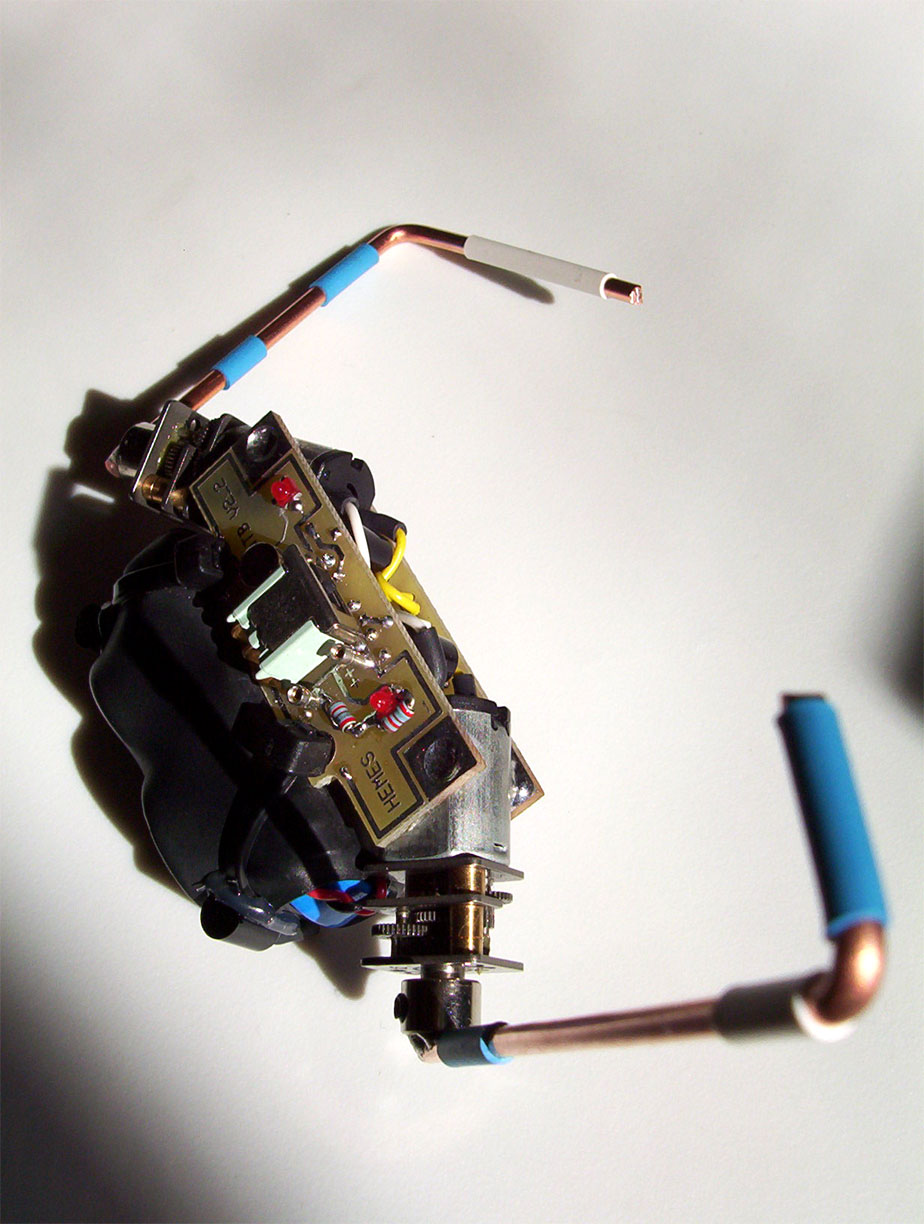
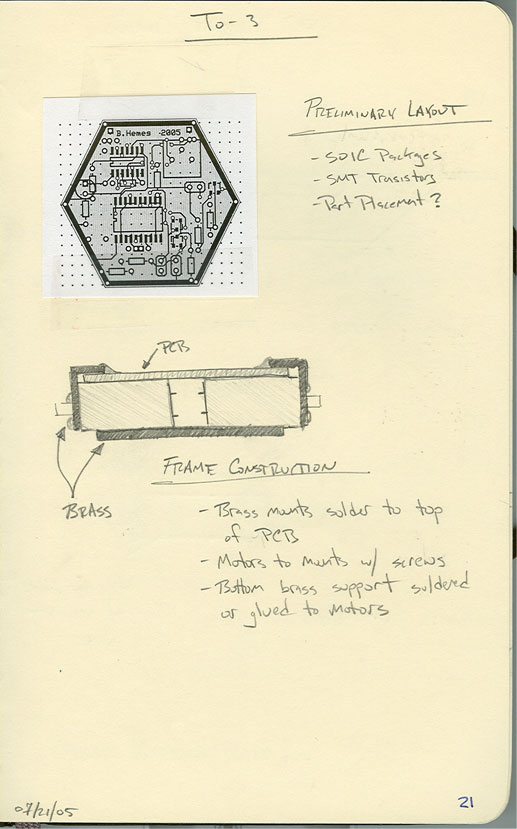
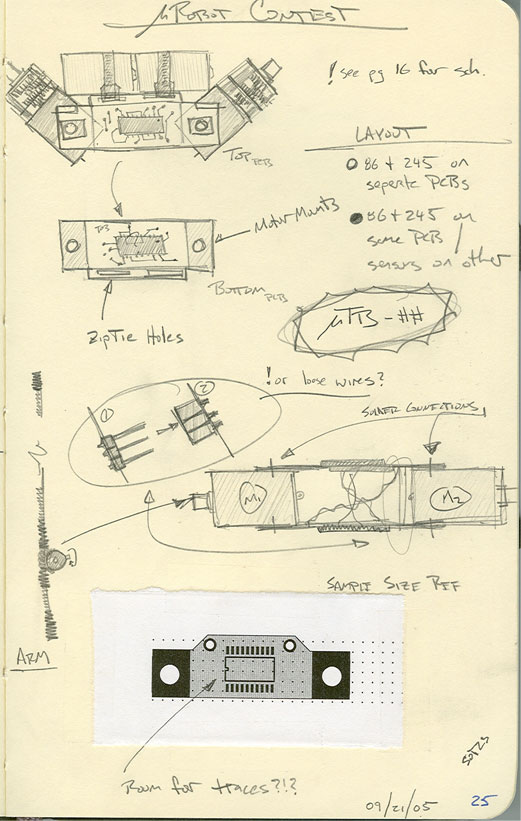
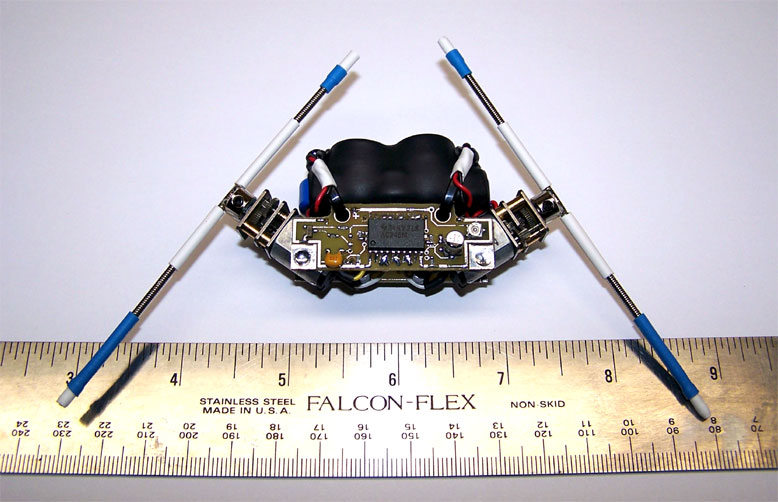
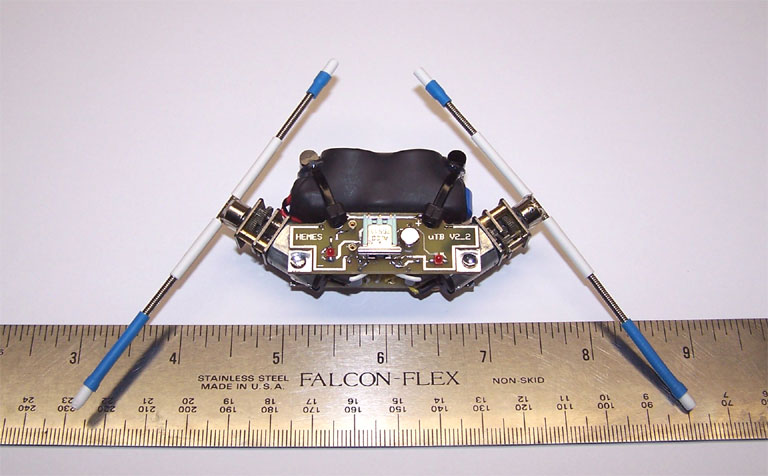
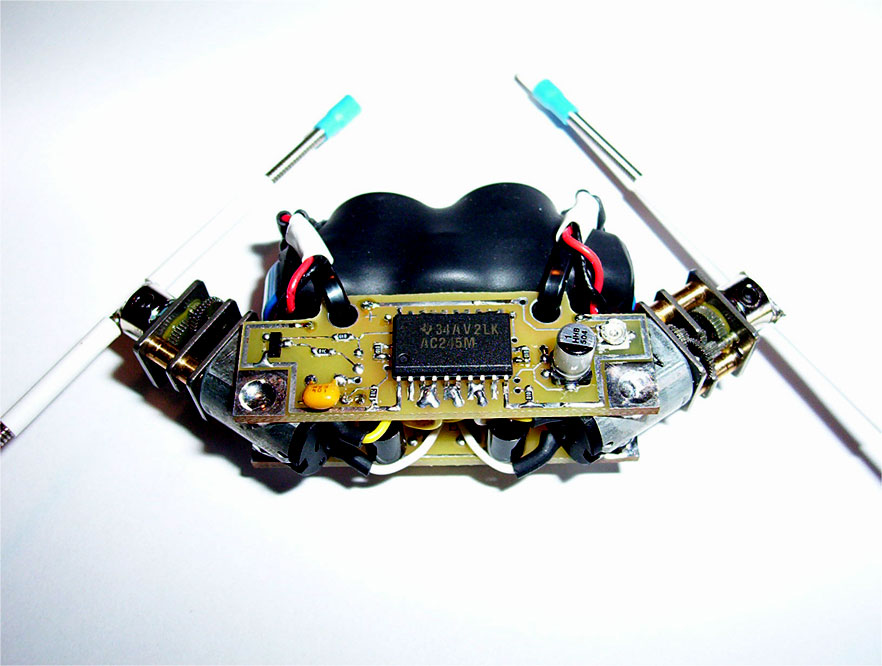
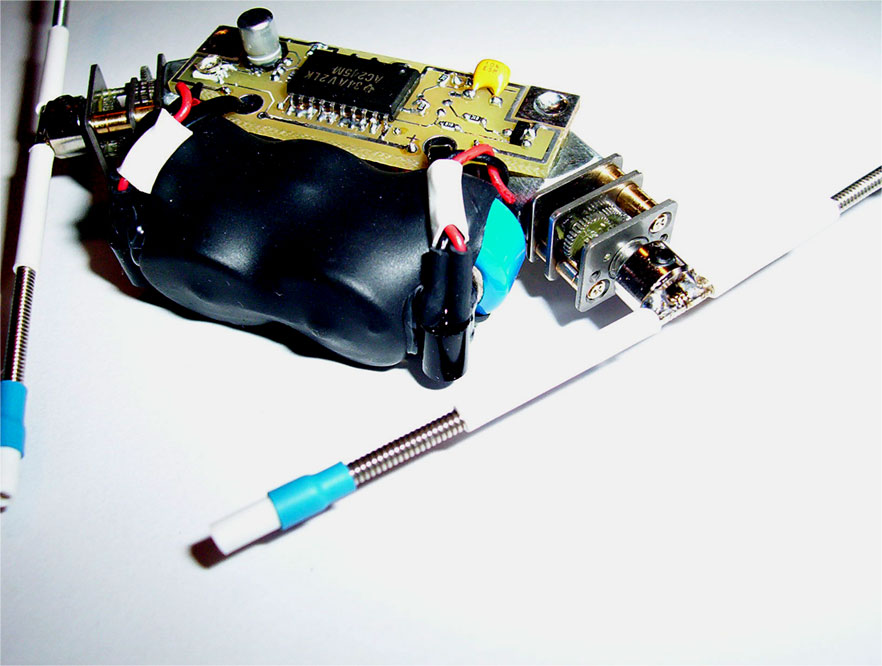
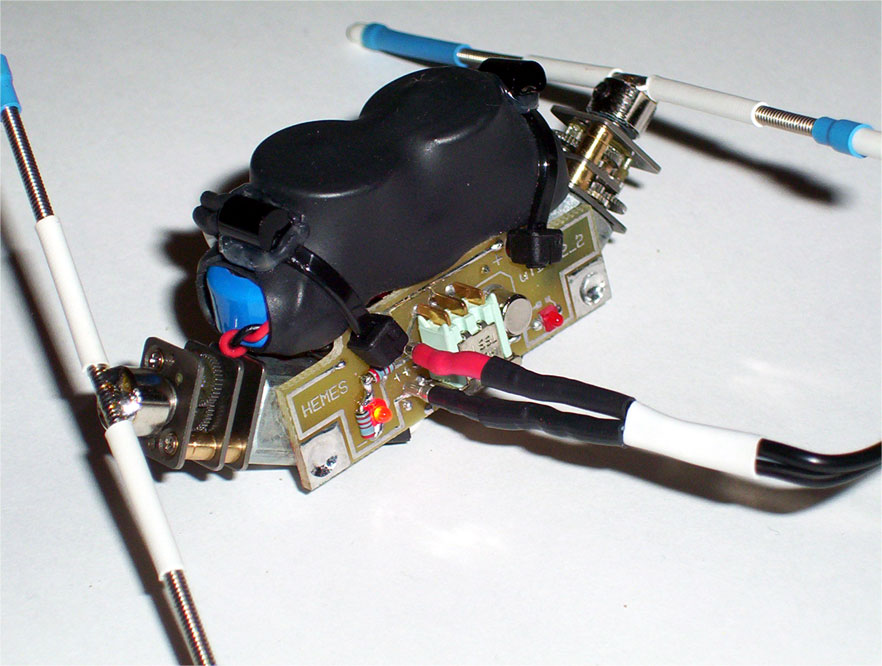
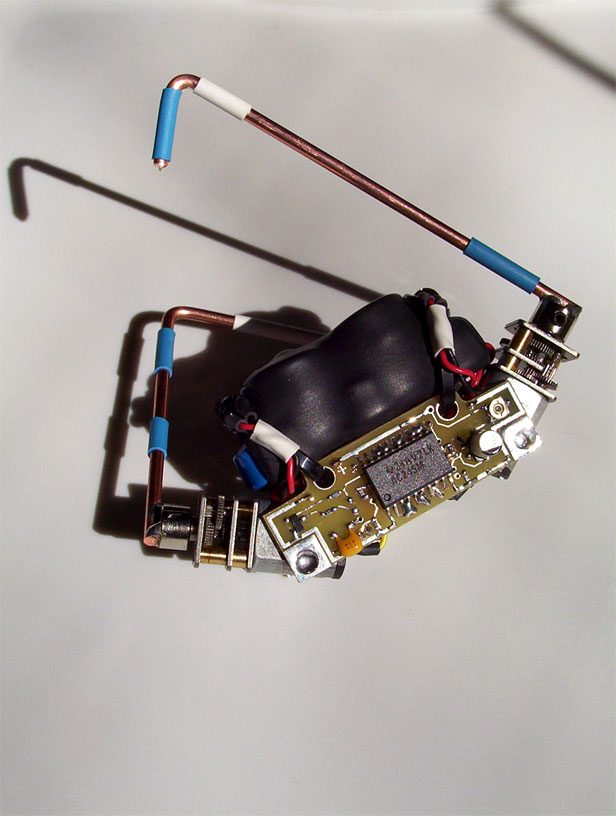
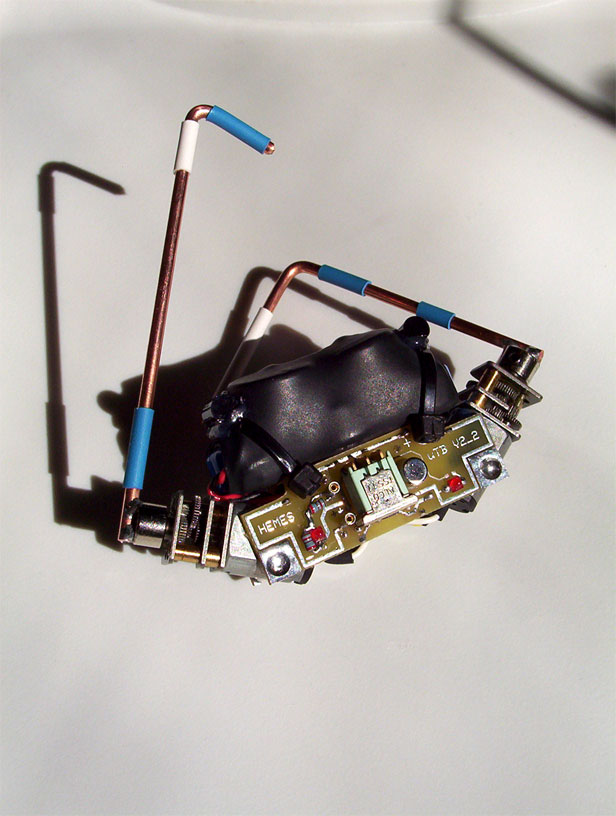
Overview The chassis of the uTBs is composed of two double-sided PCBs separated by the two drive motors. This particular chassis design makes for a very small and stiff frame that requires no extra hardware. The batteries rest on the front of each robot and are held in place by two zip-ties that pass through mounting holes in the PCBs. For locomotion, each uTB has two arms of varying shapes and materials that are used to flip itself in the desired direction. The various arm materials include spring-steel and brass rod. For rugged environments, the uTBs possess the capability to carry a protective outer shell (now under development) to protect exposed gearboxes and electrical components from hard impacts and small debris.
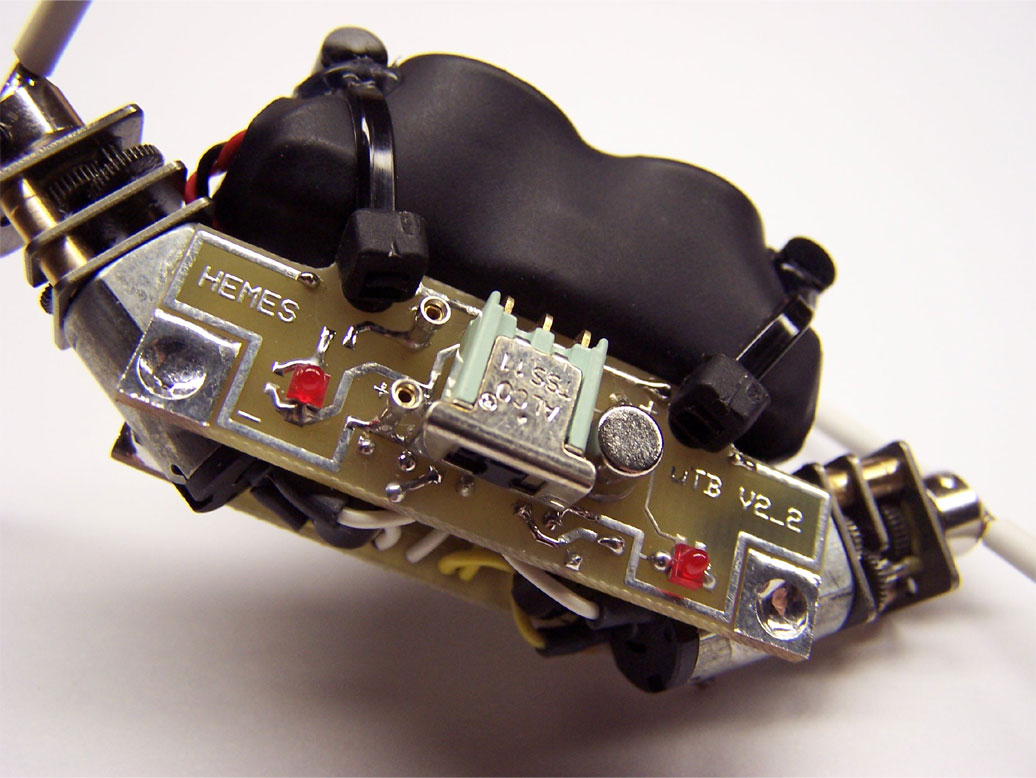
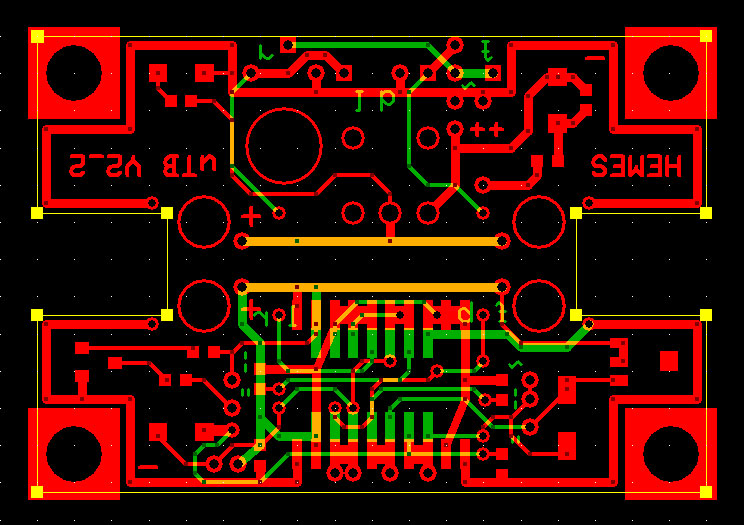
The circuit used is the Bidirectional Turbot v2.3 circuit (as seen above) by Ori Barbut and Wilf Rigter. It is a photosensitive turbot controller with bidirectional motor drivers and orientation sensing. The circuit is power aware and requires only two ICs. Four photodiodes are used for sensing and are mounted on the four corners of the turbots. This configuration allows for either photophobic or photophillic tendencies. A tilt sensor is used to detect when the robot flips and mirrors the inputs using XOR gates. |
||
|
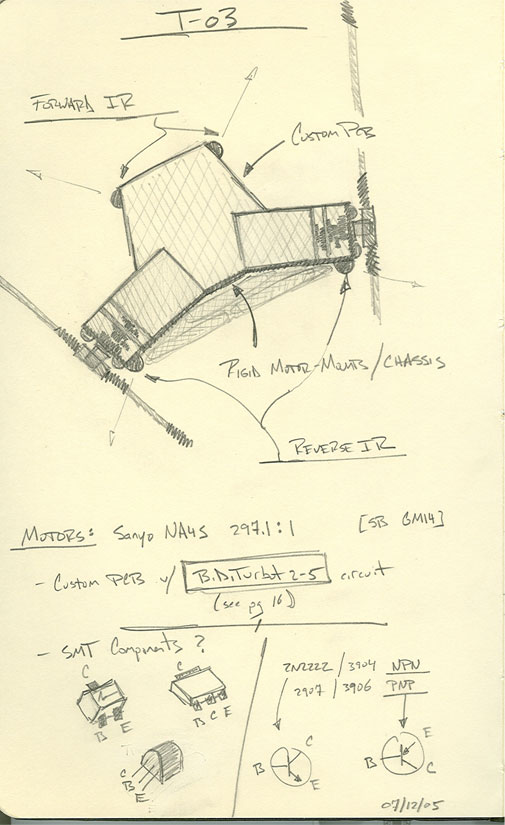
uTB Design Drawings
Component Data Sheets |
||
|
Motors
ICs / Transistors / Diodes |
Electromechanical Vibration / Tilt Switch Sensor S&K TS01ABE SPDT Horizontal Actuation Slide Switch
Passive Components |
|
|
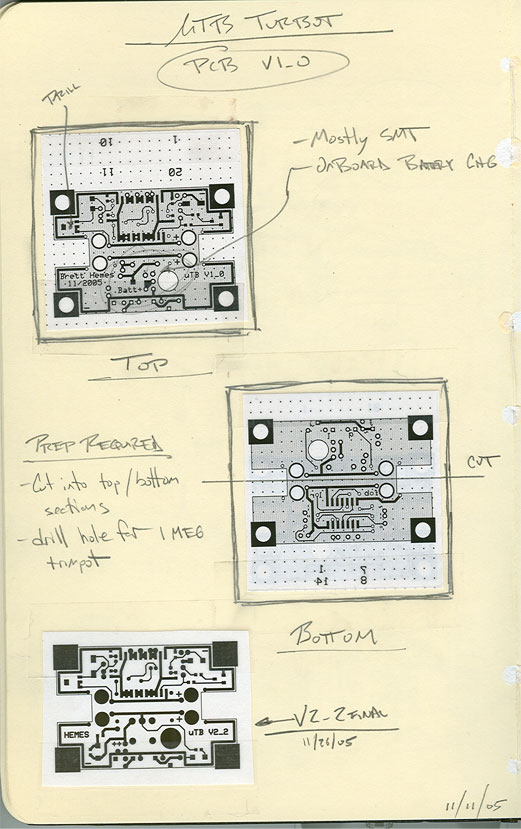
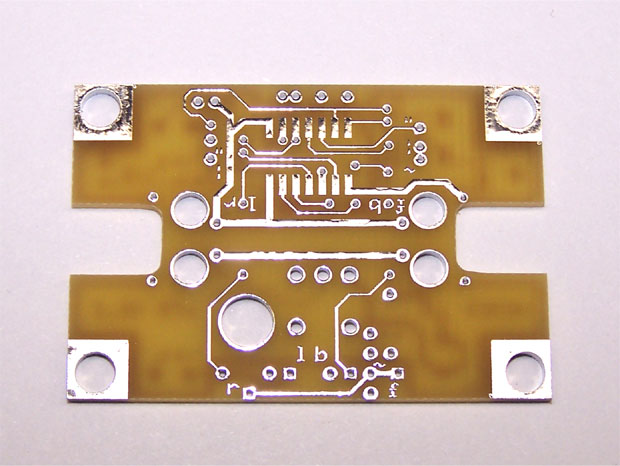
uTB PCB V2_2
Some photos of the actual
PCBs from ExpressPCB. Each board had to be cut horizontally down the
middle and be drilled to
|
||
|
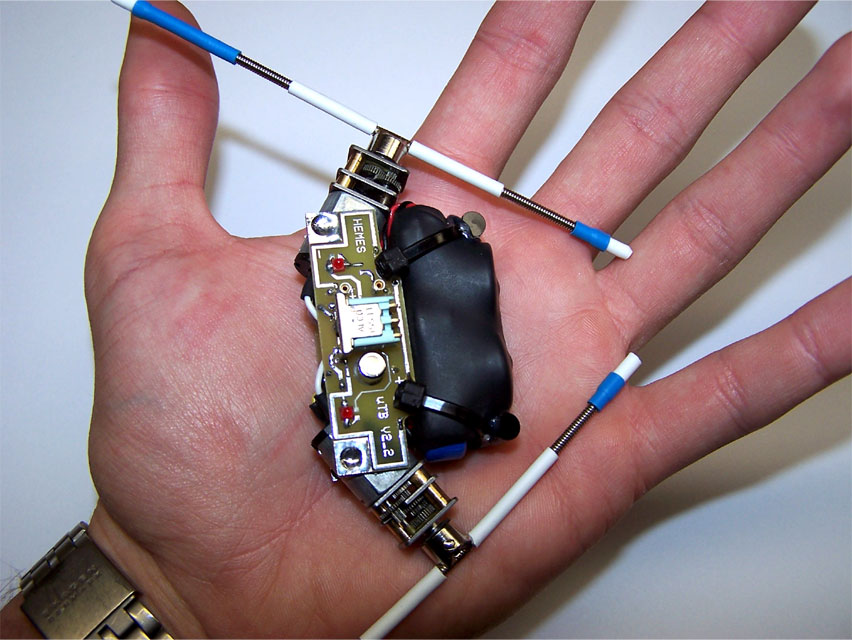
uTB_01 This is the first of the uTB series, uTB_01. The assembly of this particular robot was rushed to meet the deadline of the Solarbotics sponsored Micro Robot Competition. At the time of completion, the power switches had not yet arrived so an Alco TSS11 was substituted for the C&K TS01 ABE in the original design. Also, despite the fact that some of the pictures do not have the on-board NiCd charger completed, the final robot does indeed have this functionality (the resistors were not available during the first photo shoot).
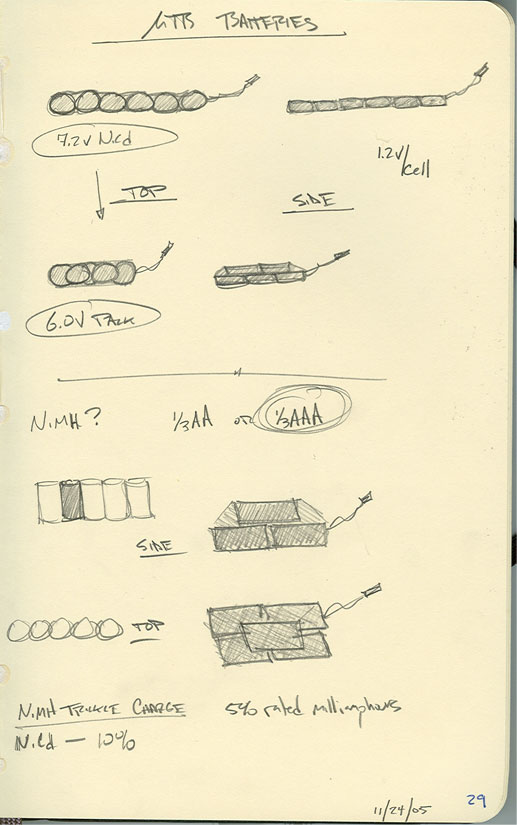
This particular uTB has arms made from spring-steel antenna salvaged from an old Bio-Bug toy. They work well and solder easily but after extreme bends they do not return exactly to their original shape. Each arm is soldered to a 1/8" brass shaft collar which fits nicely on the 3mm motor shafts. For the batteries on this particular uTB, I soldered together five NiCd button cells in series to make a six volt rechargeable battery pack that fits perfectly on the chassis. The black exterior of the battery pack is 3/4" heat-shrink tubing. This holds the cells tightly together and protects them from shorts.
Improved Leg Design
|
||
![]()